
Camillo J. Taylor,
GRASP Lab, University of Pennsylvania - [home]
|
|
|
|
In his novel "A Deepness in the Sky" Vernor Vinge offered a compelling vision of a future where armies of small, lightweight robotic elements would pervade an environment. Such a system would allow a user to automatically gather and analyze data from every corner of the space, to manipulate remote objects, to communicate with other users of the swarm and to carry out distributed computations. In the engineering community, the idea of deploying teams of small inexpensive robotic agents to accomplish various tasks is one that has gained increasing currency over the last few years.
This paradigm offers several compelling advantages. Multiple robots can be distributed around objects being manipulated to provide mechanical advantages and simplify planning problems. Sensor information gathered from multiple viewpoints simultaneously can be integrated allowing the system to form a more complete and accurate understanding of the state of the environment. The team concept also offers a certain amount of robustness since the failure of any one robot can be compensated for by the actions of the other team members. Additionally, since the robots are spatially distributed, it is less likely that any single catastrophe will completely destroy the capabilities of the ensemble. At the University of Pennsylvania we have assembled a multidisciplinary team of investigators from three departments (Computer and Information Science, Electrical Engineering and Mechanical Engineering) who are conducting research into several of the problems raised by this paradigm of distributed robotic agents. Our efforts in this area are divided into three main thrusts:
- Coordinated Motion Control: The first thrust deals with the problems associated with coordinating the motion of teams of robots. Some of the questions that are addressed by this effort include the problem of controlling the motion of robots moving in formation and coordinating the action of robots engaged in cooperative manipulation of an object.
- Cooperative Sensing: The second thrust focuses on the issues associated with combining the information obtained from distributed robots to form a coherent model of the environment. One of the interesting opportunities afforded by considering distributed teams of robots is the option of dynamically moving the robots in order to improve the estimates derived from the sensors.
- Mobile Networking: The third area of research concerns the problems associated with designing and analyzing networking strategies that are appropriate for use with distributed teams of robotic agents. Since the platforms are mobile, many of the traditional networking strategies, which were designed with fixed infrastructure in mind, are not applicable. As part of this proposal we intend to investigate questions concerning the appropriateness of various wireless networking technologies such as IEEE 802.11b and Bluetooth.
It is important to note that our research agenda is germane not only to the field of robotics but to computer science in general. With the advent of the Internet it is increasingly the case that we are surrounded by a sea of sensors, actuators and computational elements connected by networks. The techniques developed in the context of our research would also be relevant to the problems associated with marshalling these distributed resources to carry out useful tasks.
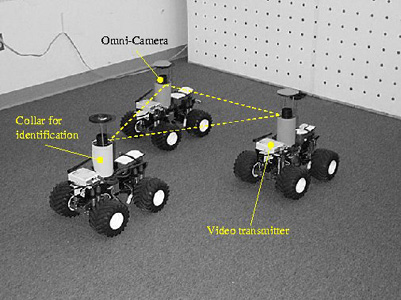
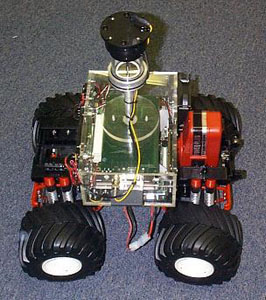
Many, though not all, of our experiments to date have been based on the ClodBuster platform shown below. With these platforms we have demonstrated, cooperative localization, formation control, coordinated manipulation, distributed mapping, online sensor planning and a number of other applications. Pleas visit the MARS page to see online movies of the system in action along with links to more papers and more pictures.