


Next: Prototype features
Up: Video Representation
Previous: Video Segmentation
For each image frame in the video we
extract objects of interest, typically moving objects. We make no
attempt to track objects. The motion information is computed
directly via spatiotemporal filtering of the imageframes:
 ,
where
,
where
 is the temporal Gaussian
derivative filter and
is the temporal Gaussian
derivative filter and
 is
the spatial smoothing filter.
This convolution is linearly
separable in space and time and is fast to compute. To detect
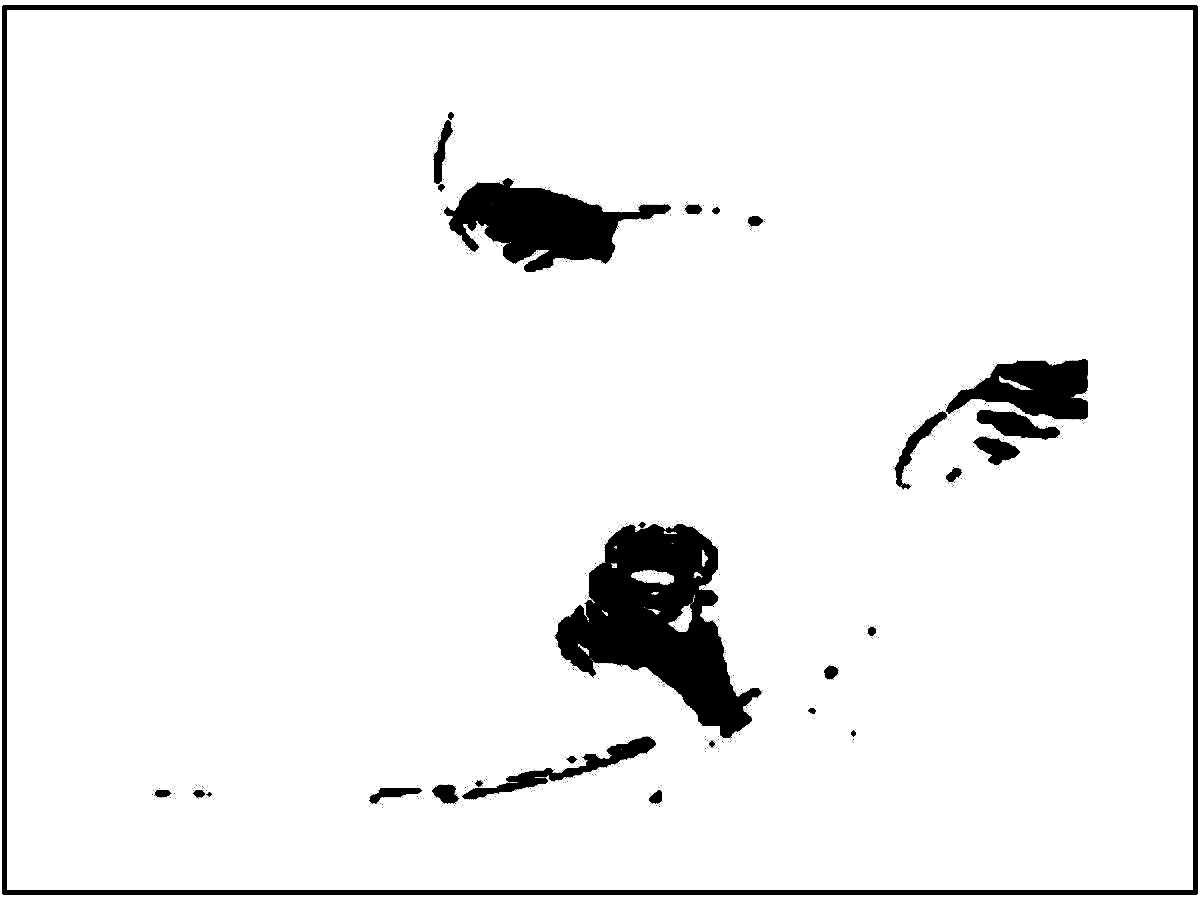
moving objects, we threshold the magnitude of the motion filter output
to obtain a binary moving object map:
is
the spatial smoothing filter.
This convolution is linearly
separable in space and time and is fast to compute. To detect
moving objects, we threshold the magnitude of the motion filter output
to obtain a binary moving object map:
 . The process is demonstrated in
figure 2(a)-(b).
. The process is demonstrated in
figure 2(a)-(b).
Figure 2:
Feature extraction from video frames. (a) original
video frame from the card game sequence. (b)
binary map of objects (c) spatial histogram of (b).
|
|
The image feature we use is the spatial histogram of the
detected objects. Let  be an
be an  spatial histogram, with
spatial histogram, with  typically equal to 10.
typically equal to 10.
 , where
, where
 are the boundaries of the spatial bins.
The spatial histograms, shown in 2(c), indicate
the rough area of object movement. Similarly, we can compute a motion
and color/texture histogram for the detected object using the
spatiotemporal filter output. As we will see, these simple spatial
histograms are sufficient to detect many complex activities.
are the boundaries of the spatial bins.
The spatial histograms, shown in 2(c), indicate
the rough area of object movement. Similarly, we can compute a motion
and color/texture histogram for the detected object using the
spatiotemporal filter output. As we will see, these simple spatial
histograms are sufficient to detect many complex activities.
Next: Prototype features
Up: Video Representation
Previous: Video Segmentation
Mirko Visontai
2004-05-13
![\includegraphics[width = 0.15 \textwidth, height = 0.12 \textwidth]{objdetect/bjori}](img13.png)
![\includegraphics[width = 0.15 \textwidth, height = 0.12 \textwidth]{objdetect/bjhist}](img14.png)