| SWARMS Home | |
| Goals | |
| Participants | |
| Institutions | |
| Research | |
| Repository | |
| Meetings | |
ResearchFuture military missions will rely on large, networked groups of small vehicles and sensors operating in dynamic, resource-constrained, adversarial environments. Groups of this type will typically operate with little or no direct human supervision and will be very difficult, if not impossible, to efficiently manage or control by programming or by tele-operation. Management of such large groups will thus be extremely challenging and will require the application of new, yet-to-be-developed methods of communication, control, computation and sensing, specifically tailored to the command and control of large-scale, autonomously functioning vehicle groups. To address these challenges, we propose to embark on a broadly-based, cross-disciplinary research program in which we will develop and study a variety of biologically-inspired models of swarm behaviors which are appropriate to large networked groups of autonomous vehicles. Biologists have argued that swarming behaviors are necessary when there are large numbers of individuals which lack either the communication or computational capabilities required for centralized control. Through on-going collaborations with experts in artificial intelligence and biology, members of our team have already been studying the potential benefits to multi-vehicle control of various biological models of group behavior and organization intended to explain observed group dynamics in beehives, ant colonies, wolf packs, bird flocks, steer herds and fish schools. In addition, we are active collaborators with molecular and cell biologists interested in cell differentiation, quorum sensing, stringent response, integration of signals across multiple spatiotemporal scales, and many other emergent behaviors. We propose to use these models to devise individual controller and group-wide protocol design methodologies for the coordination of large networks of sensors and vehicles. We will be specifically concerned with the scalability of these concepts and with the robustness and stability of the managed networks to which they apply. In addition, we propose to evaluate and demonstrate the ideas which we develop using computer simulation as well as multi-vehicle experimental testbeds. The SWARMS project will lead to (a) a new framework and theory for swarming; (b) new algorithms for multi-vehicle coordination and control based on architectural, behavioral, and functional models of groups known to biologists; and (c) novel testbeds for technology transition. 1. System-Theoretic Framework for Swarming: Biological models of group behavior are built on continuous models of dynamics of individuals, local interactions with neighbors, and changes in the dynamics and set of neighbors. While dynamics at the level of individual units may be adequately described by differential equations, the interactions with neighbors are best described by edges on a graph. Modeling, analysis, and control of swarms will require a comprehensive theoretical framework and a new language with formal semantics for the synthesis of artificial swarms and new behaviors.
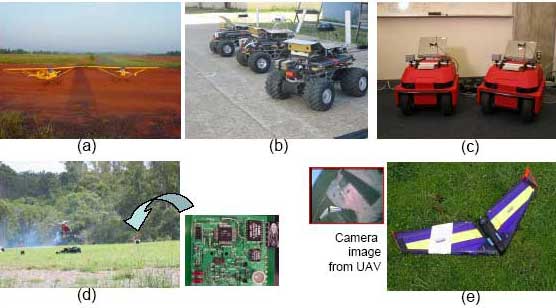
3. Analysis of Swarm Formation, Stability and Robustness: The analysis of swarm behaviors in biology requires the development of specific mathematical and algorithmic techniques. We will develop a new set of mathematical tools that will require the marriage of dynamical system theory, switched systems, discrete mathematics, graph theory and operations research. Our analysis based on these tools will provide formal justification for observed and new ``emergent'' phenomena and collective behaviors that adapt to changes in the environment in the form of inputs and adversarial threats. 4. Synthesis: Formation and Navigation of Artificial Swarms: We will use behavioral and architectural models from the biology and artificial intelligence communities to develop a design methodology for functional, emergent behavior. Central to this methodology is the solution to the inverse problem in navigation for controlling the aggregate motion and shape of the group, and the application to problems of active perception and coverage. 5. Sensing and Communication for Artificial Swarms} This thrust will address the application of our design methodology to multi-vehicle control. Reducing bio-inspired collective behaviors to practice requires a number of practical considerations which also have deep theoretical underpinnings. State estimation requires the localization of vehicles based on local, limited-range sensory information. Localization of n vehicles in a m-dimensional configuration space requires O((nm)^6) computations. We will develop distributed algorithms for localization, for diffusing sensory information through a network of vehicles and sensors, and for distributed control of groups. 6. Testbeds, Demonstrations and Technology Transition: We propose experimental work with Swarms testbeds for scientific evaluation and translational research in two distinct areas. First, we will address the search, identification and localization of targets using swarms of micro UAVs. Second, we will develop adaptive networks for threat and intrusion detection. This network will consist of minimalist, mobile sensors that will be able to identify sources of threat and adapt to breaches in the network. Finally, we will bring both experimental testbeds together for a capstone demonstration at the end of the project. Swarms Testbeds
|