MAVRIC: Morphology-Agnostic Visual Robotic Control
May 17, 17170·
,
,
,
,
·
0 min read
Brian Yang*
Dinesh Jayaraman*
Glen Berseth
Alexei Efros
Sergey Levine
Abstract
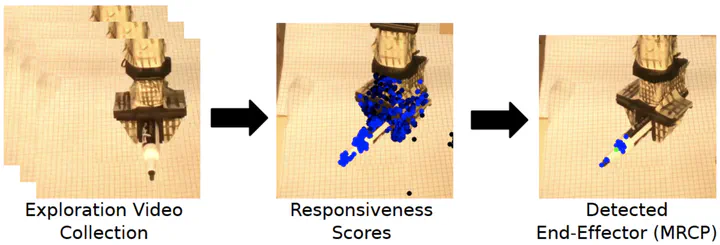
Existing approaches for visuomotor robotic control typically require characterizing the robot in advance by calibrating the camera or performing system identification. We propose MAVRIC, an approach that works with minimal prior knowledge of the robot’s morphology, and requires only a camera view containing the robot and its environment and an unknown control interface. MAVRIC revolves around a mutual information-based method for self-recognition, which discovers visual ``control points’’ on the robot body within a few seconds of exploratory interaction, and these control points in turn are then used for visual servoing. MAVRIC can control robots with imprecise actuation, no proprioceptive feedback, unknown morphologies including novel tools, unknown camera poses, and even unsteady handheld cameras. We demonstrate our method on visually-guided 3D point reaching, trajectory following, and robot-to-robot imitation.
Type
Publication
In ICRA and RA-L